|
 |
|
| Jim Worthey • Lighting & Color Research • jim@jimworthey.com • 301-977-3551 • 11 Rye Court, Gaithersburg, MD 20878-1901, USA |
|
|||||||
|
|
|||||||
|
| Legacy
Understanding |
|
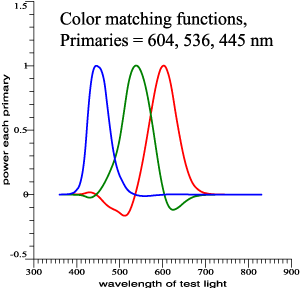
Fictitious but realistic color-matching data. |
 |
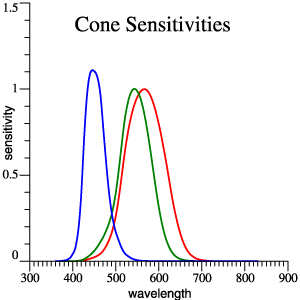 |
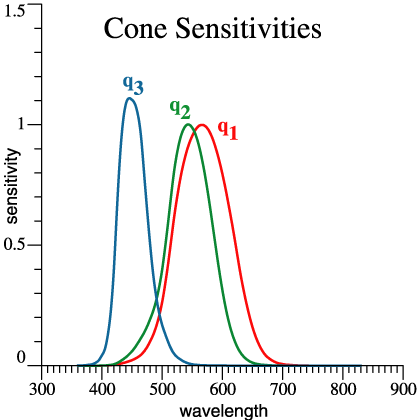
Cones,
red,
green
and blue. |
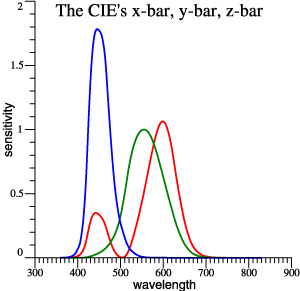
| Traditional
x-bar,
y-bar, z-bar |
 |
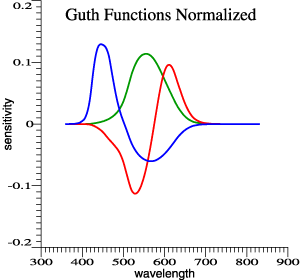 |
Guth's 1980
model,
normalized. Achromatic function is proportional to
y-bar. |
|
Linear
transformations
of color-matching data predict the same matches.
This is Figure 1. < The only numbered figure! > |
|||
| How
does a set of 3 functions predict color matches? |
 |
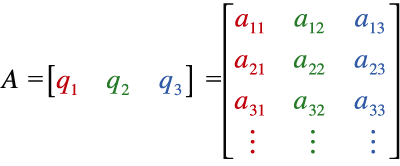 (Eq. 1) |
| A
set of color matching functions, CMFs, can be thought
of as column
vectors, which become the columns of a matrix A. Matrix A can contain
any of the 4 sets of color matching functions above,
for example. |
|
| SPD
as a Column Vector |
| The
spectral
power distribution of any light can be written as a
column vector L1.
It is then summarized by a tristimulus vector V, V = AT L1
.
(2)
Light L1 is a color match for light L2 if AT L1 =
AT L2
.
(3)
Refer again to the Figure 1. If Eq. (3) holds for one set of CMFs A, then it will hold for the other sets. That much is standard teaching. |
 |
| Moment
of Reflection |
 |
So, everybody
knows
that alternate sets of functions can be equivalent for
color-matching.
But it's remarkable that 2 sets can be
equivalent-for-matching, but
also look very different, and be suited for other
applications that go
beyond matching. For example:
Nominal time
= 1:37 pm, Pacific
Time
|
| Animation
Digression: Simulated Experimental Data |
| What's Missing? |
|
So... we have at least 4
interesting sets of functions that are
equivalent-for-matching, but
have further meanings. What's missing is a good scheme for vectorial addition of colors. In his 1970 Book, Tom Cornsweet emphasized vector addition to account for overlapping receptor sensitivities: |
 |
 My
method is inspired by Cornsweet, but also by Jozef
Cohen.
|
| Jozef Cohen's Innovations. |
 Jozef B. Cohen's Book |
 |
| Smoothness
of
Object Spectral Reflectances |
|
 |
 |
 |
The “Dependency” paper was little
noted for 20 years, but is now widely cited. The idea
is referred to as
a “linear model,” and is the basis for many studies
with a statistical
flavor. Having used some linear algebra ideas in a
curve-fitting task,
Cohen then asked, “Could linear algebra be applied
directly in thinking
about color-matching data?” In the traditional
presentation,
color-matching data are transformed and one version is
as good as
another. Cohen asked a daring question: “Is there an
invariant
description for a colored light?” We may well ask, “What would it even mean, that a function or vector is invariant?” Cohen started with Wyszecki’s idea of “metameric blacks.” If 2 lights have different SPDs, but are colorimetrically the same, they are metamers. Subtracting one light from the other gives a metameric black, a non-zero function with tristimulus vector = 0. Consider an example of D65 and a mixture of 3 LEDs adjusted to match: |
 |
The figure at left shows the
concept of metameric black. A mixture of 3 LEDs
matches D65.
Subtracting D65 from the LED combo gives the black
graph, a function
that crosses zero and is colorimetrically black. The
metameric black is
a component that you cannot see, as noticed by
Wyszecki. Cohen then
said, “Let’s take a light (such as D65) and separate
it into the
component that you definitely can see, and a metameric
black.” (My
wording.) The component that you definitely can see is
the light
projected into the vector space of the color matching
functions. Cohen
called that component... ... ta-dah ...
|
| The Fundamental
Metamer. |
| Cohen needed a formula to compute the fundamental metamer. As a practical matter, the “projection into the space of the CMFs” means a linear combination of CMFs that is a least-squares fit to the initial light. As on p. 3, let A be a matrix whose columns are a set of CMFs, | |
|
. (1) |
| For a light L(λ), we want to
find the 3-vector
of
coefficients, C3×1,
such that L
≈ AC
.
(4)
Where ‘≈’
symbolizes
that least-squares fit. Today, you might do a web
search and you would
learn to solve for C
using theMoore-Penrose pseudo-inverse = A+ =
(ATA)−1AT ,
so that
(5)
That would give
you C as a
numeric 3-vector, and if we
define ...C = A+L = (ATA)−1AT L . (6) Fundamental Metamer of L = L* = The
least-squares fit to L,
(7)
|
|
| The Fundamental
Metamer,
continued. |
| then, L* = AC .
(8)
A numerical value
for
3-vector C
gives a numerical
vector for L*,
but no new
insight. The value of C—the
coefficients for a linear combination of CMFs—depends
on which CMFs you
are using. Nothing is invariant. Deriving everything
from a blank page,
Cohen in effect combined Eq. (6) and Eq. (8) to find
thatL* = [A(ATA)−1AT]
L .
(9)
Then L is the original
light, L* is
its fundamental metamer, and
the expression in square brackets is projection matrix
R:R = A(ATA)−1AT
.
(10)
Cohen noticed
that R
is invariant, and that led to other interesting ideas.My algebra looks different from Cohen’s. But the invariant projection matrix R remains important. R is invariant in the strongest possible sense. If A is any set of equivalent CMFs, like any of the sets in Fig. 1, then R is the same large array of numbers, not scaled or transformed in any way. For proof, see Q&A. |
| Fundamental
Metamer Example. |
 |
At left for example, the blue
curve shows L
= D65. The
purple curve is L*,
the
fundamental metamer of D65. The two curves are
metamers in the ordinary
sense. L*, a
linear
combination of CMFs, is found by: L*
= RL .
(11)
Eqs. (8) and (11) have '=' and not '≈' because L* by definition is the least-squares approximation. So that’s Jozef Cohen’s
Highly Original Contribution. Now a few screens above,
We were talking about vectors... |
| Cohen
References: Cohen, Jozef, “Dependency of the spectral reflectance curves of the Munsell color chips,” Psychonom. Sci. 1, 369-370 (1964). Cohen, Jozef, Visual Color and Color Mixture: The Fundamental Color Space, University of Illinois Press, Champaign, Illinois, 2001, 248 pp. <Book remains in print, as far as I know.> |
|
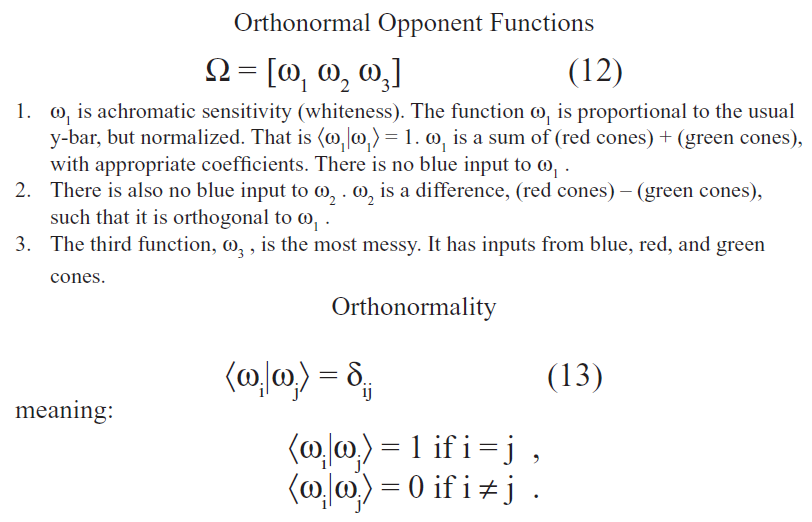
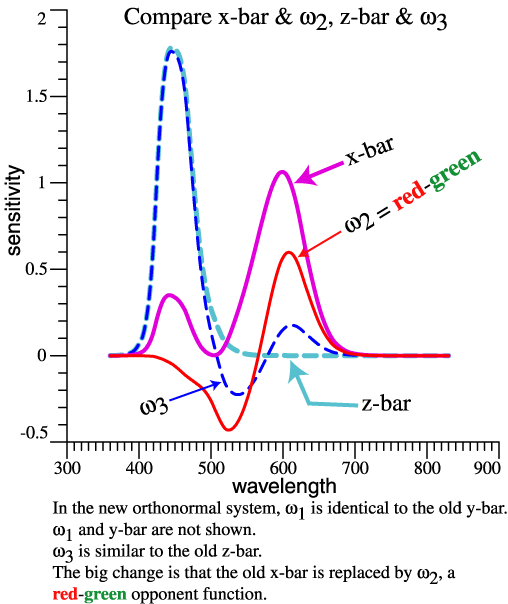
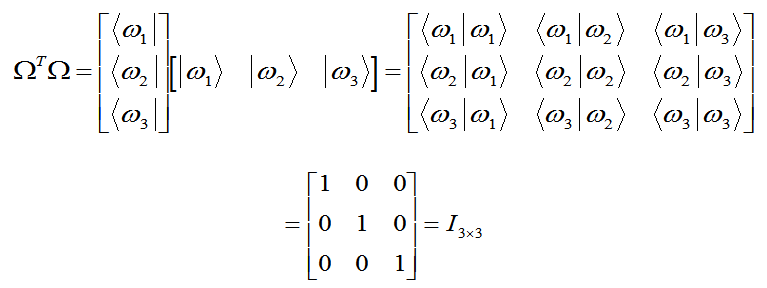
| Orthonormal
Opponent Color Matching
Functions. |
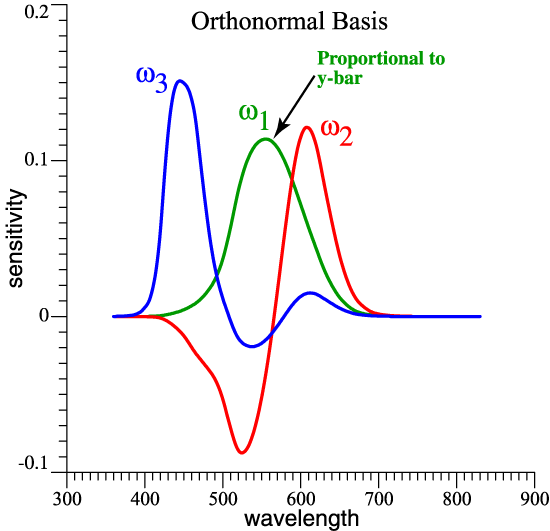
| Orthonormal
Opponent Color Matching
Functions: Description. |
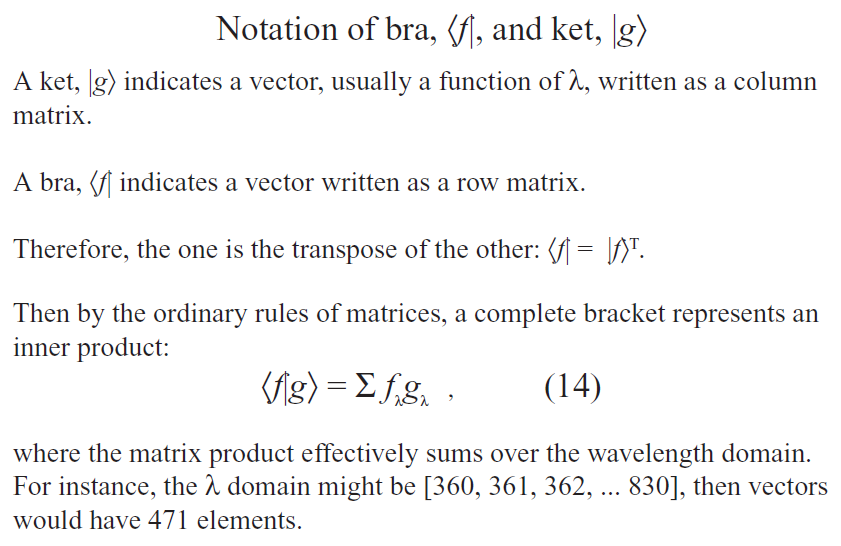
| Bra
and
Ket Notation |
| Working
Class Summary |
| Although many clever
ideas (from
Cohen, Guth, Thornton, Buchsbaum, etc.) guided its
development, in the
end the orthonormal basis is not radically new: |
|
 |
|
| Practicality |
|
A new orthonormal basis could be created for any standard observer or camera. If it will suffice to have orthonormal opponent functions based on the 1931 2° Observer, then tabulated data are available at http://www.jimworthey.com/orthobasis.txt . |
11etc, etc. Recall that graphs are above. Nominal time =
2:08 pm, Pacific
Time
|
| Fun with Matrices |
 |
(15) |
| Alternate Practical
Presentation <Bonus
item,
not in handout!> |
| If you already
have
the functions x-bar, y-bar, and z-bar handy in your
computer, then you
can generate the orthonormal basis by adding and
subtracting those
vectors. It's one matrix multiplication. If T is the 3×3 matrix below, and X is the array [x-bar y-bar z-bar] , then Ω
= X*T
.
What's
below
is program output, where OB = OrthoBasis = Ω . The
output
explains a derivation for T and what's calculated
numerically. |
| Abbreviate
OB =
OrthoBasis = Omega, and X = [x y z]-bar We seek xfmn T such that OB = X*T. So, solve that equation for T: OB = X*T Multiply both sides by OB', then apply orthonormality: OB' * OB = OB' * X * T I = OB' * X * T T = inv(OB' * X) <transformation matrix that we need> T = inv(OB'*X) = { [ 0.0000000000 , 0.1875633629 , 0.0306246445 ] [ 0.1138107224 , -0.1332892909 , -0.0312159276 ] [ 0.0000000000 , -0.0397124415 , 0.0793190892 ] } Now compute OB = X*T, and test the result: OB'*OB = { [ 1.0000000000 , 0.0000000000 , 0.0000000000 ] [ 0.0000000000 , 1.0000000000 , -0.0000000000 ] [ 0.0000000000 , -0.0000000000 , 1.0000000000 ] } Carrying plenty of digits gives a convincing identity matrix in the check calculation. |
| Graphing
a Vector |
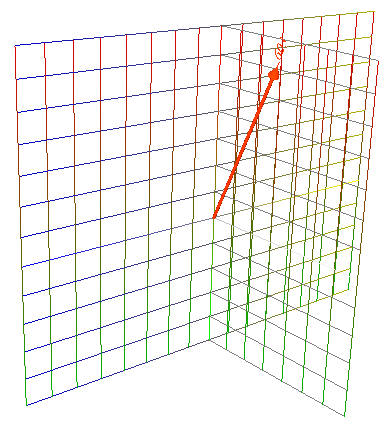 |
Now recall Eq.
(2)
above, and let A
= Ω
. That is, let the set of CMFs be the orthonormal set.
Then V = ΩT
|L1〉.
A
tristimulus vector V
can be
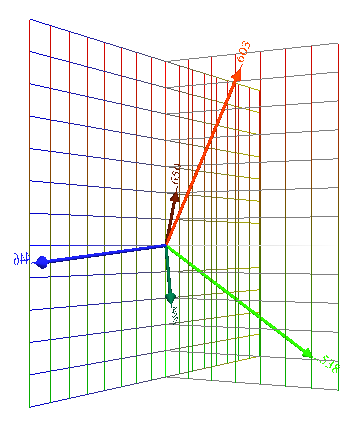
graphed in 3 dimensions. At left is the
vector for a 603 nm narrow-band light at unit power.
The
vector length depends on the optical power of the
light and
the eye’s sensitivity at that wavelength. By
definition,The ket
notation is a
reminder that |L1〉
is a column vector.
V = [v1 v2 v3]T.
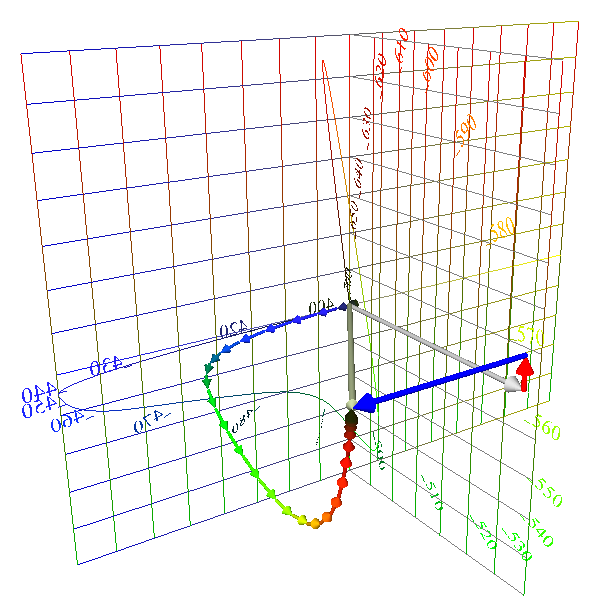
The vector is drawn from the origin. The achromatic (= white) v1 axis is the line from the origin that fades to white. Up-down is the red-green v2 axis with red at the top. To the left from the origin is the v3 or blue axis. The opposite of blue is yellow. The graph paper is colorized according to the color directions. The intuitive meaning of the opponent-color functions ω1, ω2, ω3, leads to an intuitive graph. |
| 5
Vectors |
 |
At
left 5 colors are graphed: Thornton’s Prime Colors, 603 nm, 538 nm, 446 nm, plotted at unit power, give long vectors. An extreme red, 650 nm, and a blue-green, 490 nm, also at unit power, give shorter vectors. What is the significance of vector length? The algebra of color vectors is specifically about additive color mixing. |
| 5
Vectors Added |
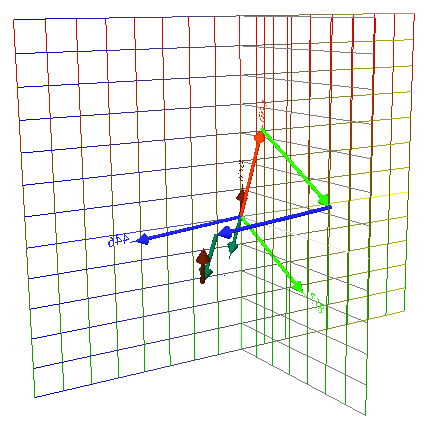 |
The
same 5 vectors point from the origin, again for the 5
unit-power
lights, at 603, 538, 446, 650, and 490 nm. Then the 5
vectors are
added, tail to head, as vectors normally add. The
resultant is
a white vector. So, vector length has a non-mysterious meaning: According to the eye’s overlapping sensitivities, and a light’s wavelength and amplitude, each light maps to a vector with length and direction. Then vector addition predicts color matches. |
| Wavelengths
of Strong Action |
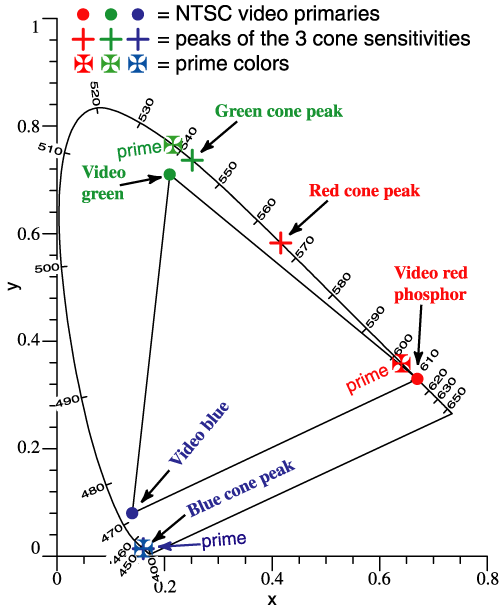
| A color mixture is predicted by adding vectors, but vectors [X Y Z]T are traditionally not graphed. Now suppose that it is 1950 and we are trying to invent color television. It will be helpful if the phosphor colors correspond to long vectors in well-separated directions. Indeed, the NTSC phosphors are approximately at Thornton’s Prime Colors, 603, 538, 446 nm. | |||||||||||||||||||||||||||||
|
 |
||||||||||||||||||||||||||||
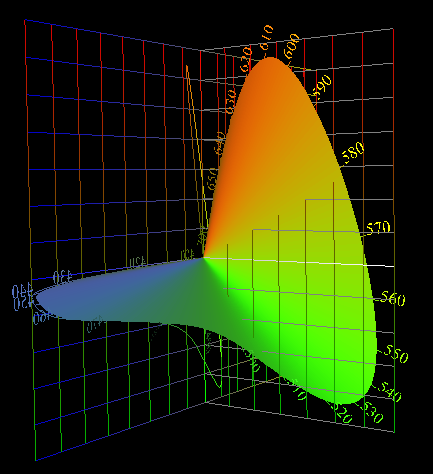
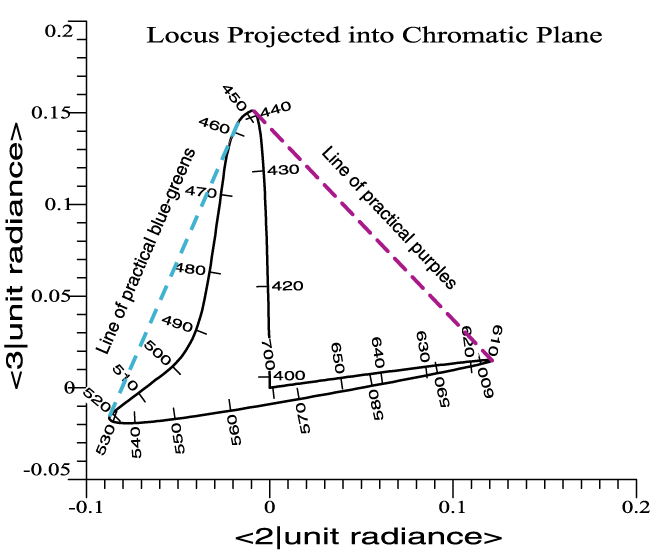
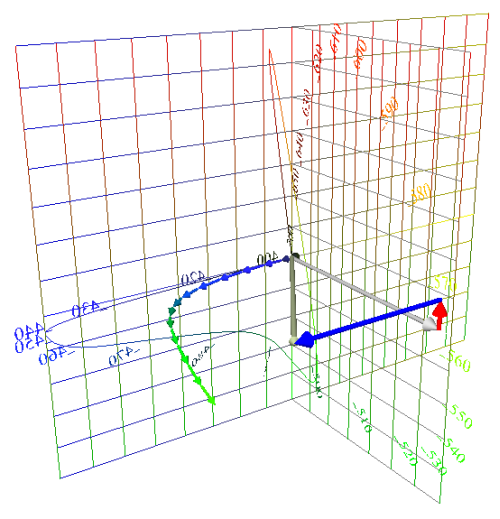
| Locus
of Unit Monochromats |
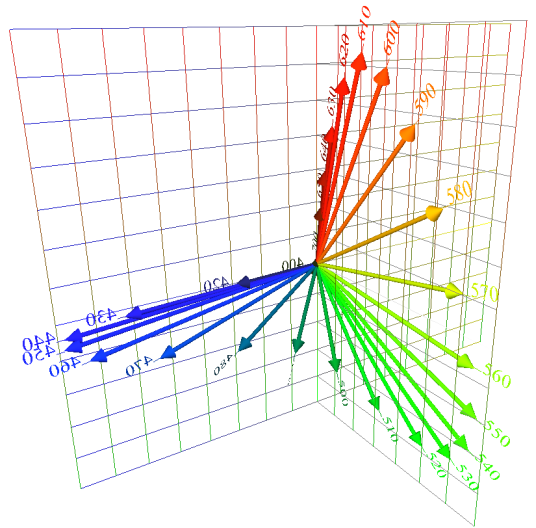 |
If λ of a
narrow-band
light of unit power is stepped through the spectrum
and then its color
vector is plotted at each step, the vectors trace out
a locus, shown at
left. Jozef Cohen referred to this curve in 3
dimensions as "The Locus of Unit
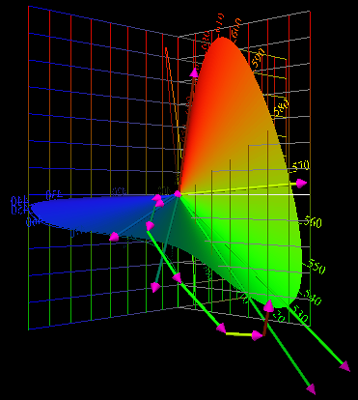
Monochromats." The curve is a spectrum locus. By monochromat, Cohen meant a narrow-band light. The word unit means unit-power. Each monochromat has the same optical power, which gives meaning to the vector lengths. The "unit power" idea was one of Cohen's great leaps forward, because in the legacy system, a vector [X Y Z]T is found, and then we rush to plot it in the (x, y) diagram, losing the vector length. "Unit power" leads to a picture in which vector length has meaning. |
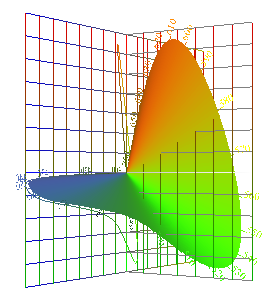
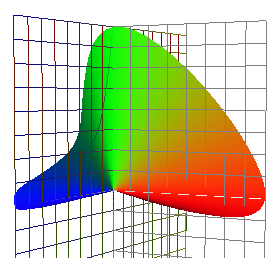
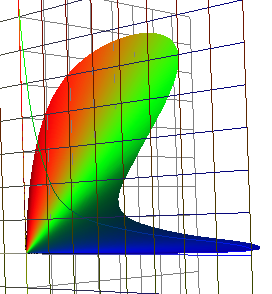
| Locus
of Unit Monochromats (continued) |
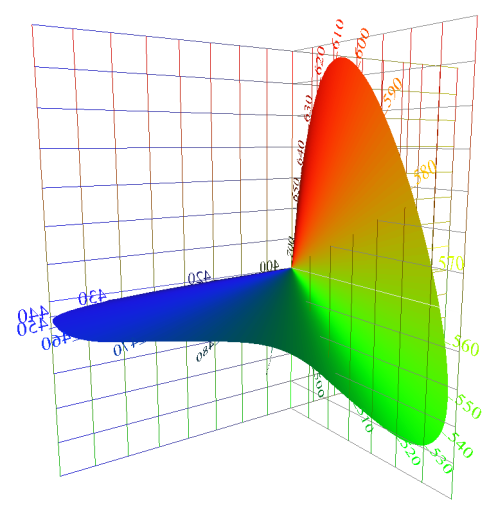 |
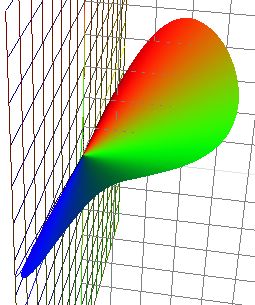
I often show the Locus of Unit Monochromats (LUM) by a surface. The locus is really the curve along the edge of the surface.
If you would look in Jozef Cohen’s articles, you would notice at first that his algebra looks different from mine. Also, he does not identify the LUM as a locus of tristimulus vectors. His vectors have more than 3 elements, and no preferred axes. Cohen
showed that the LUM as he described it has an
invariant shape. The
LUM based on the orthonormal opponent functions is
the same invariant
locus discovered by Cohen. Algebraic tinkering could
rotate the LUM
with respect to the axes, but its shape would not
change (except for
a possible mirror-image transformation). To generate the LUM from the
orthonormal basis, simply graph the rows of Ω. |
| 5
Vectors Added (revisited) |
 |
The locus of unit
monochromats can be included to give a frame of
reference to a vector
sum or other interesting diagram. |
| Composition
of a White Light |
|
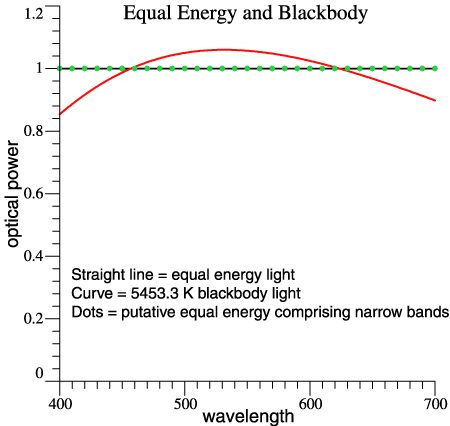
The so-called "equal energy light" is one that has constant power per unit wavelength across the spectrum, indicated by a solid black line in the figure at the right. The straight-line spectrum makes a simple discussion and is similar to a more realistic light, 5453 K blackbody (or 5500 if you like). For the next step, let’s assume an equal-energy light that packs all of its power at the 10-nm points, 400, 410, and so forth, as indicated by the green dots. |
 |
| Composition
of a White Light (continued) |
|
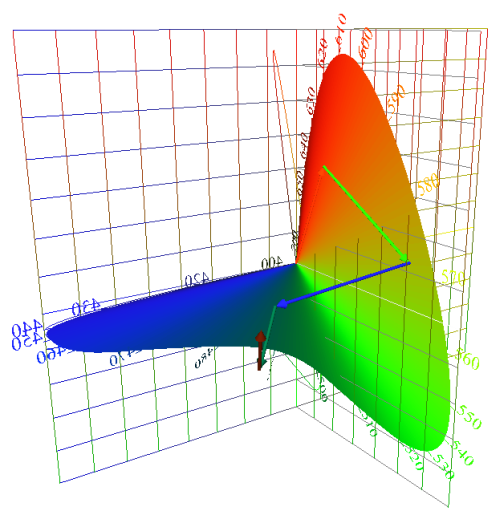
At right, the 31 narrow bands add up to make Equal Energy White. Each band contributes an arrow: blue, blue ..., blue-green, blue-green ... green ... green-yellow ... orange ... red. Added tail to head, the arrows sum to a particular white. The resultant of all that vector addition can be graphed as a single arrow from the origin. Conceptually, that arrow has 3 components, also shown as white, red, and blue arrows. The one arrow, or the set of 3, those symbolize the traditional approach, except it would be done in XYZ space. The chain of 31 arrows forms a pattern that will repeat for most white lights. It makes solid progress towards blue, then swings in the green direction, then back towards red. |
 |
| Composition
of a White Light (continued) |
 |
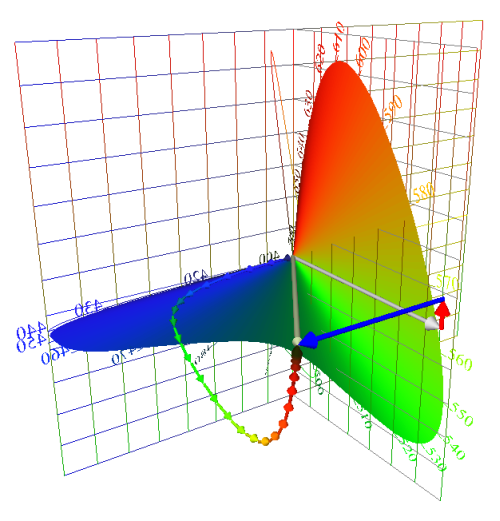
The swing toward red almost cancels the swing towards green. The greenish and reddish vectors are all present in the light, but red cancels green, approximately. I have explained the same idea in the past without vectors. |
| Now
let
this white light be shined on colored objects, and
think of what
an object color does. A red object reflects a range of
the reddest
vectors, while absorbing green and blue. The light
looks white, but
it must have red in it to reveal the red object as
different from
gray or green. The most saturated colors will be those that reflect one or two segments of the spectrum and absorb the rest. You can think of those colors as "snipping out" a segment of the chain of vectors that compose the white light. Is it a new idea to snip out part of the spectrum? No! The idea is called limit colors and is associated with MacAdam, Schrödinger and Brill, among others. On the next page is an illustration from MacAdam’s book, showing the possible ways to snip out parts of the spectrum. I won’t discuss limit colors at length, but they are a well-known idea. |
|
| Objects
that Snip out Parts of a White Light |
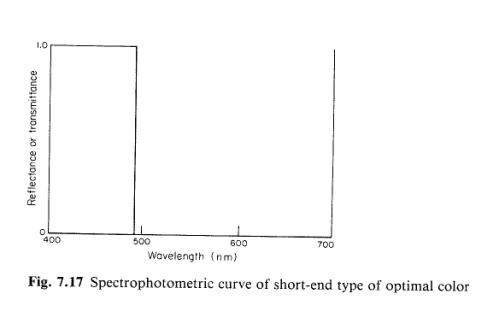 Figures
from D.
L. MacAdam, Color
Measurement: Theme and Variations,
Springer, Berlin, 1981. |
 |
|
Observation: Many discussions
of limit
colors focus on a color gamut. Here we look at a
more basic step,
the limit color's interaction with the components of
a white light. |
|
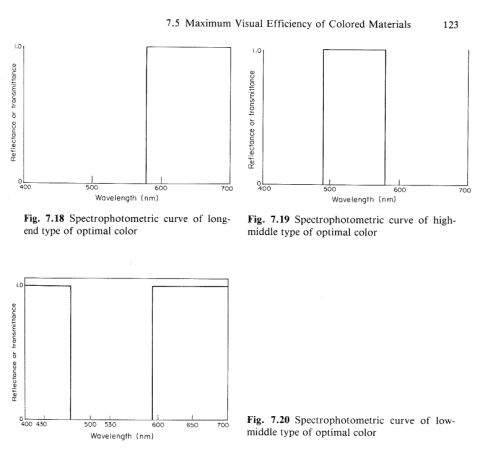
| One
Example: a Short-end Optimal Color |
At right, a
hypothetical "short-end" color reflects all
wavelengths up to 540
nm. The rest of the light disappears. The light source
is the
equal-energy light. Then the reflected light yields
the vector chain
on the right. The entire equal-energy spectrum, as
above, would sum
to the point where the one arrow, and the chain of
three meet. When
the full chain of vectors for the equal-energy light
is shown, you
can picture partial chains being snipped out according
to MacAdam’s 4
types of optimal color:
|
 |
| Why
So Many 3-Dimensional Drawings? |
Let’s look at another use of the orthonormal opponent functions.
| Minimizing
Correlation |
|
The orthonormal basis and Cohen’s space are a multi-purpose system. One benefit is that v1, v2, v3 are less correlated than other sets of tristimulus values.
|
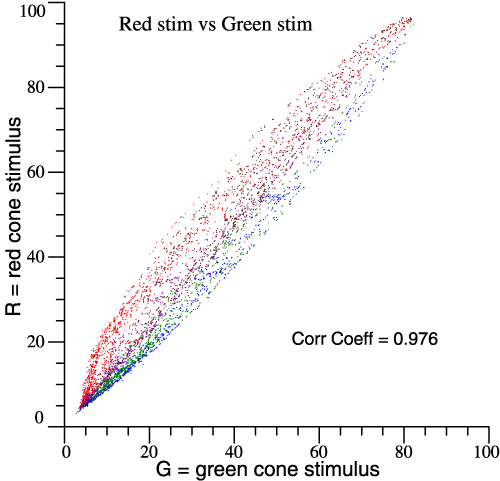 |
| Spectral
reflectances
are available for a set of 5572 paint chips: Antonio
Garcia-Beltran, Juan L. Nieves, Javier
Hernandez-Andres, Javier
Romero, "Linear Bases for Spectral
Reflectance Functions of Acrylic
Paints," Color
Res. Appl. 23(1):39-45,
February 1998. Professor Garcia kindly sent me the raw
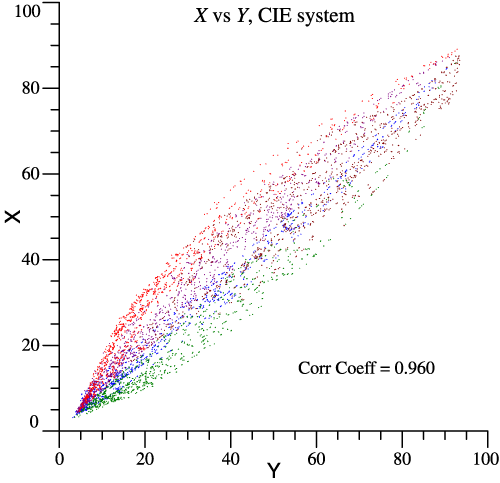
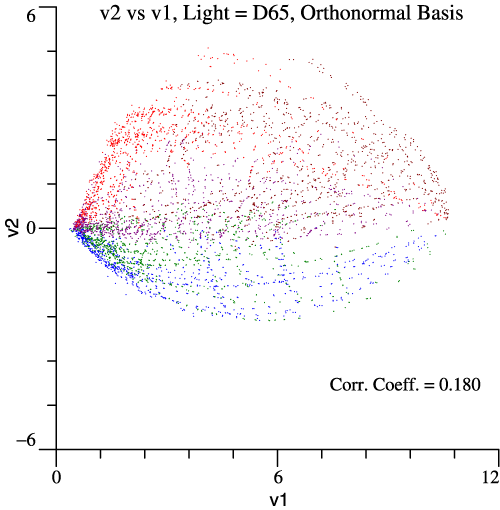
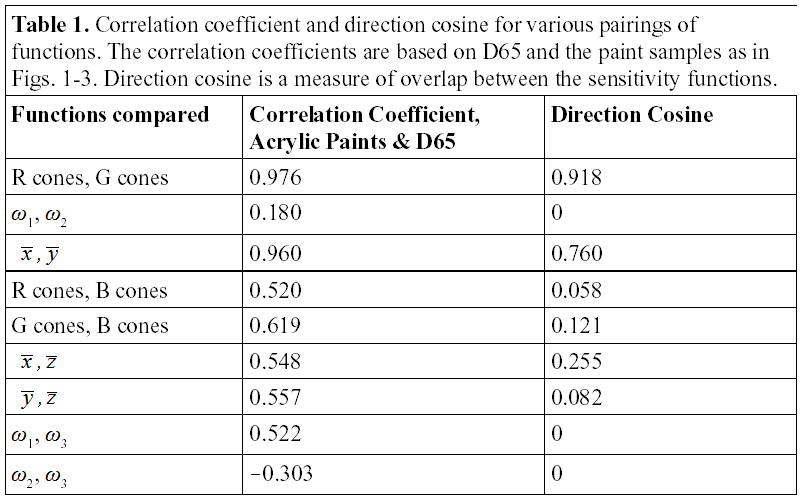
data. To make realistic visual stimuli, let the paint chips be illuminated by D65. Then one stimulus can be plotted against another to see if they are correlated or independent. Garcia et al. put the chips in color groups, so I’ve colored the dots accordingly. The graph above shows that red and green cone stimuli are highly correlated, correlation coefficient = 0.976. X vs Y in the legacy system is a little better, while the opponent stimuli v1 and v2 are most independent, Correlation Coefficient = 0.180 . |
|
 |
 |
| Relationships
Among Equivalent Sets of CMFs |

| CMFs
Graphed as if they Were Lights |
| Because of orthonormality, the functions |ωj〉 plot to the v1, v2, v3 axes. (Not emphasized in the drawing!) Legacy function y-bar also plots to the +v1 axis. Red and green cones plot near to each other and to +v1. Also, r cones and g cones lie in the v1–v2 plane. Blue cones and z-bar are the same direction and close to +v3. x-bar is not in the v1–v2 plane, or on the spectrum locus. In short, the graph shows similarities and differences among functions. | 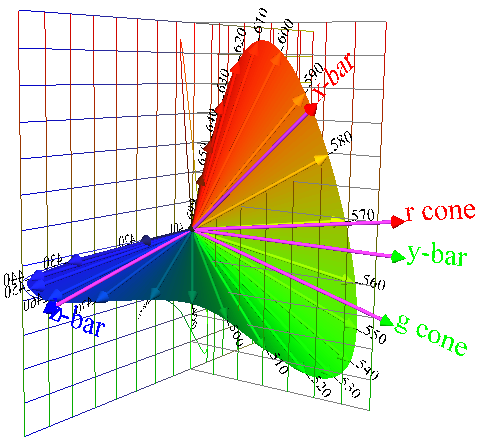 |
|
Simplicity would be lost if a similar plot were made with axes X, Y, Z. Then, for example the y-bar function would not plot to the Y axis, since y-bar has non-zero inner products with x-bar and z-bar. |
|
 |
|
| The orthonormal
pairs, with cosine
= 0, give the lowest correlation of the paint chips,
but not zero
correlation. With other populations of object colors,
correlations may
vary. Nominal
time: 2:33 pm
|
|
| Opponent
Colors and Information Transmission |
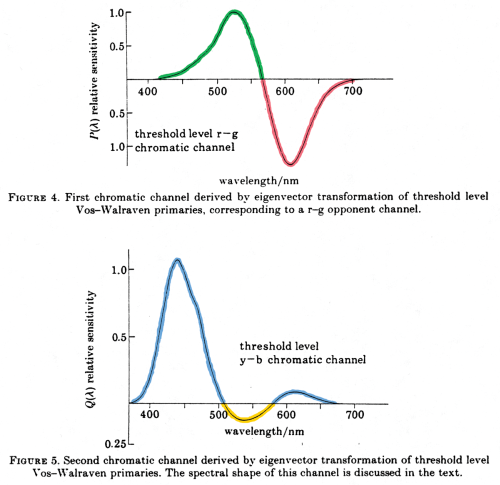
| Above I’ve shown the
benefit of an opponent system for information
transmission (image
compression) in an empirical way, by starting with
thousands of paint
chips. Buchsbaum and Gottschalk proceeded differently,
deriving an
opponent-color system to optimize information
transmission. They
started with cone functions that are similar to the
ones I use, and got
a result like my opponent model. That is, they got an
achromatic
function (not shown) similar to y-bar, and the
red-green and
blue-yellow functions shown at right. The achromatic
and red-green
functions have minimal blue input, and the blue-yellow
function crosses
the abscissa twice and looks very much like function
that I have been
using. |
 |
| This equation,
scanned right out
of the original article shows how their first two
functions have little
blue input, etc: |
|
 |
|
| Their functions A, P, Q are
orthogonal, but not
normalized. Long story short, Buchsbaum and Gottschalk started with cone functions and derived opponent functions. They had a specific goal of optimum information transmission. I derived opponent functions in a simple way and discovered their connection to Cohen’s work. In the end, the sets of functions are extremely similar, confirming that the opponent basis is appropriate for image compression and propagation-of-errors. All orthonormal sets based on the same cones lead to the same Locus of Unit Monochromats, so in that sense Buchsbaum’s set cannot be wrong. [Gershon Buchsbaum and A. Gottschalk, “Trichromacy, opponent colours coding and optimum colour information transmission in the retina,” Proc. R. Soc. Lond. B 220, 89-113 (1983).] |
|
| Value
of Cohen's Space and Orthonormal Basis |
Benefits
of the orthonormal basis can be listed:
|
| The
last list
item is
most important and
echoes Jozef Cohen’s ideas. If you have two lights
(2 SPDs) as stimuli
to vision, they
have an intrinsic vector relationship. Each
light has an
invariant fundamental metamer, which is its
projection into the vector
space of the CMFs. Vectors V obtained using Ω have
the same
amplitudes and vector relationships as fundamental
metamers. Functions
x-bar and y-bar are intrinsically 40.5° apart, but ω1,
ω2, ω3
are 90°
apart, so v1, v2, v3
are more appropriate axes than X, Y, Z. |
| End
Digression,
return to Vector Composition of Lights |
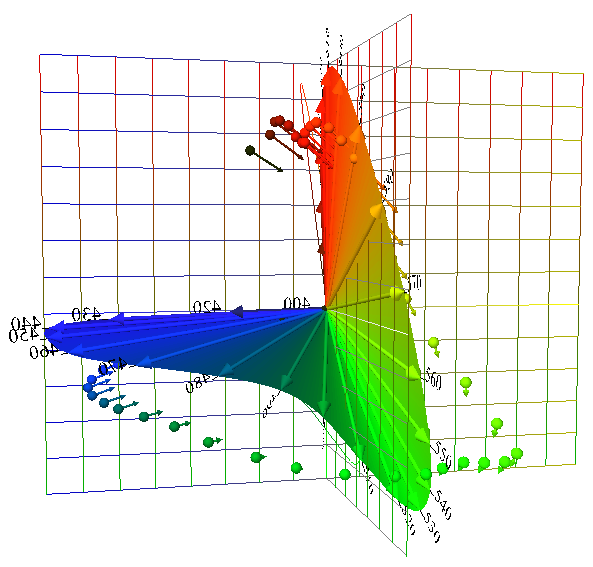
| The figure at
the
right once again shows the equal energy light as a
vector sum. Power is
assumed to be in narrow bands at multiples of 10 nm, 400, 410, ... ,
700
nm .
Although the power is the same in all bands,
they map
to vectors of varying amplitude and direction,
according to the facts
of color matching. As a practical matter, the little
vectors are based
on certain rows of matrix Ω. |
 Equal Energy light as a vector sum. |
 |
A key issue for lighting and color is that the chain of arrows swings toward green and back towards red. If this light shines on a white paper, the green and red almost cancel, but if it shines on a red pepper, the red pigment selects a group of red vectors, by absorbing green ones. Then it matters how much red was in the light. |
| Some
Lights Have Less Red and
Less Green |
|
A
white light has net redness or greenness that is small
or zero. The
same white point can be reached by different lights in
different
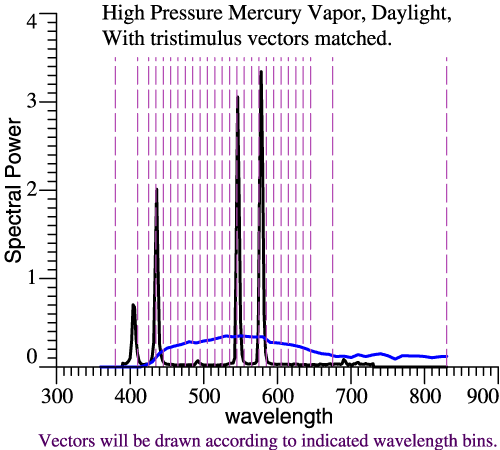
ways. SPDs of 2 lights are plotted at right. The black line is High Pressure Mercury Vapor light, while the blue is JMW Daylight, adjusted to have the same tristimulus vector. (Yes, that means they are matched for illuminance and chromaticity.) The wavelength domain is chopped according to the dashed vertical lines. The wavelength bands are 10 nm, except at the ends of the spectrum, with most bands centered at multiples of 10 nm. If one light then multiplies the columns of Ω, those products could be graphed as a distorted LUM, but we skip that step. |
 |
| Instead, the color composition of each light will be graphed as a chain of vectors. Nominal time = 2:42 pm | |
| Comparing
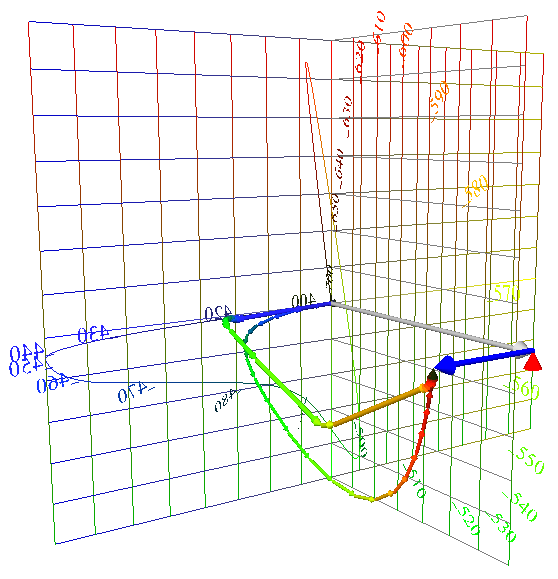
Color Composition of Lights |
| Now the same two lights are
compared in their vector composition. The smooth chain
of thin arrows
shows the composition of daylight. Slightly thicker
arrows show the
mercury light. The mercury light radiates most of its power in a few narrow bands, leading to a few long arrows that leap toward the final white point. Compared to “natural daylight,” the mercury light makes a smaller swing towards green, and a smaller swing back towards red. Such a light would leave the red pepper starved for red light with which to express its redness. |
 |
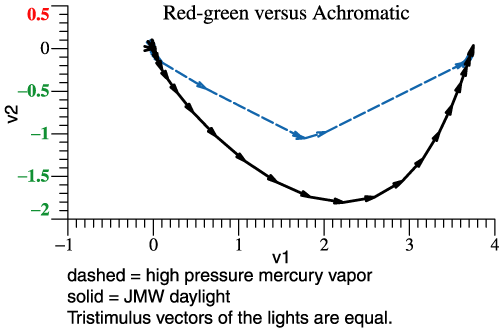
| Above two lights are
compared by the narrow-band components of their
tristimulus vectors. At
right the same information is shown, but projected
into the v1-v2
plane. The loss of
red-green contrast is the main issue with lights of
“poor color
rendering,” and that shows up in this flat graph. If
you were really
designing lights, you might use the v1-v2
projection as a main tool. You might want to add
wavelength labels to
the vectors. (In the VRML picture, λ info is indicated
by coloration.
In the picture at right, vectors that are
approximately parallel
pertain to the same band.) |
 |
| Other interesting data can be
plotted in Cohen’s space. Suppose that the 64 Munsell
chips from
Vrhel et al. are illuminated first by daylight and
then by the mercury
light. Since the mercury light lacks red and green, we
expect it to
create a general loss of red-green contrast among the
64 chips. The graph at right is a projection into the v2-v3 plane. Each arrow tail is the tristimulus vector of a paint chip under daylight. The arrowhead is the same chip under the mercury light. The lightest neutral paper is N9.5, and is a proxy for the lights. Notice that 3-vectors projected into a plane still have the properties of vectors in the 2D plane. As expected, red and green paint chips suffer a tremendous crash towards neutral. |
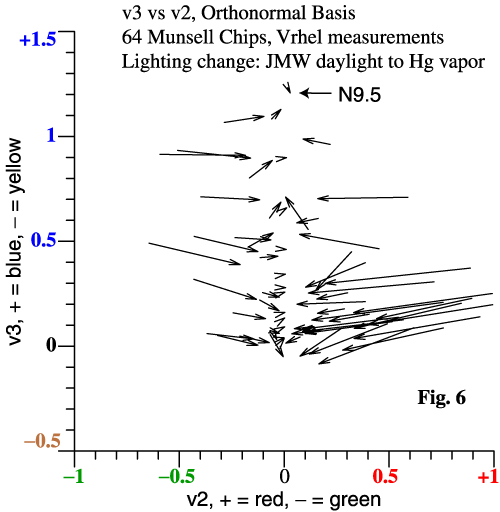 |
| Actual neutral
papers appear as
arrows of zero length. For an alternate presentation about comparing lights, please see “How White Light Works,” and the related graphical material. |
|
| Cameras
and the "Luther Criterion" |
|
The Luther Criterion,
also known as the Maxwell-Ives Criterion:
For
color fidelity, a camera’s spectral sensitivities
must be
linear combinations of those for the eye. |
|
|
|
| Bold
Steps for Camera Analysis |
| Compare
Camera LUM to that of Human |
| At right is a screen
grab from the
virtual reality comparison of a Dalsa 575 sensor’s
LUM to the 2° human
observer LUM. The spheres represent the LUM of the
camera The
arrowheads trace the best fit to the human LUM by
the camera functions. Please let go of the details for a second, and try to see the big picture. The human LUM is an invariant representation of trichromatic color vision. The camera has its own LUM. We want to compare them, but must somehow position them for a clear comparison. The Fit First Method finds the camera LUM in a good alignment. |
 |
| The
Fit First Method |
| Conceptually, the
camera’s LUM
(spheres) is more fundamental than the fit to the
human LUM
(arrowheads). The trick of the Fit First Method is
to find the best fit
first, then find the LUM from that. Here is the computer code: Rcam
= RCohen(rgbSens) # 1
CamTemp = Rcam*OrthoBasis # 2 GramSchmidt(CamTemp, CamOmega) # 3 The camera’s 3 λ sensitivities are stored as the columns of array rgbSens . Because of the invariance of projection matrix R, it doesn’t matter how the functions are normalized, or whether they are actually in sequence r, g, b. Statement 1 finds Rcam, the projection matrix R for the camera. RCohen() is a small function, but conceptually, RCohen(A) =
A*inv(A’*A)*A’ . (7)
In other words, step 1 applies Cohen’s formula for the projection matrix. Then Rcam is the projection matrix for the camera. In step 2, the columns of OrthoBasis are the human orthonormal basis, Ω . The matrix product Rcam*OrthoBasis finds the projection of the human basis into the vector space of the camera. But, the wording about projection is another way of saying that step 2 finds the best fit to each ωi by a linear combination of the camera functions. So, step 2 is the “fit” step. (More programming specifics.) |
|
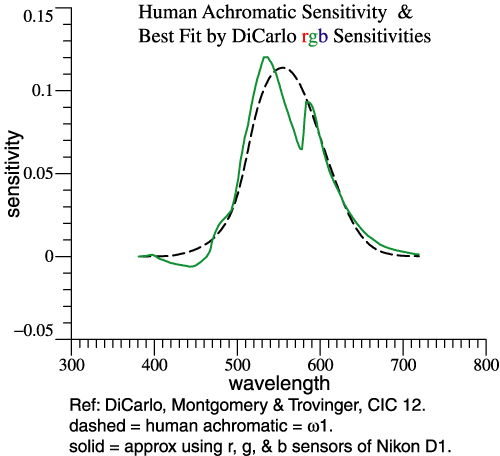
| Step 2 does 3 fits at
once, but let's
look at just one. At right, the dashed curve is ω1,
the human achromatic function. The camera in question
happens to be a
Nikon D1. The solid curve is a linear combination of
that camera’s r,
g, and b functions that is the least-squares best fit
to ω1.
There would be other ways to solve the curve-fitting
problem, but
projection matrix R
is
convenient. A best fit is found for each ωj
separately. The resulting re-mixed camera functions
are not an
orthonormal set. |
 |
| Step 3,
Orthonormalize the Re-mixed Camera Functions |
|
| Since
the
re-mixed camera functions are computed separately,
they are not
orthonormal and would not combine to map out a true
Locus of Unit
Monochromats. But they mimic Ω
and are in
the right sequence. We need
to make them orthonormal, which is what the
Gram-Schmidt method does,
Step 3. |
|
 |
 |
|
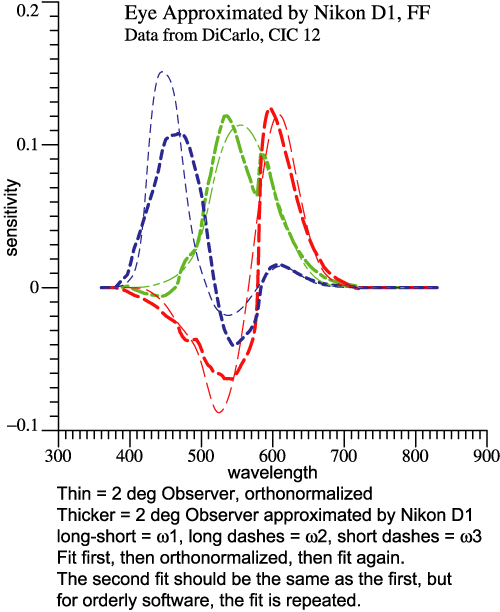
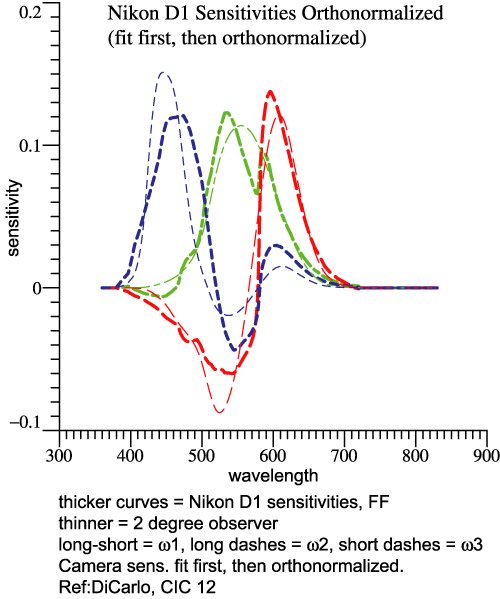
The
two sets of graphs above look similar. But the
one on the left shows the set of “fit” functions. The
one on the
right shows the orthonormal basis of the Nikon D1. The
thinner curves
pertain to the 2°
observer, the thicker ones to the camera. Why Does
it
Matter?
When
you have the orthonormal basis, for the eye or for a
camera, you
can do many things with it.
Combining the 3 functions generates the Locus of Unit
Monochromats.
The orthonormal property leads to some simple
derivations. On the Q&A
page, see "Can
we have fun with orthonormal functions?"The Noise
Issue
To extract
color
information, some subtraction must be done. The
signals subtract but
the noise adds (in quadrature). The noise
discussion becomes more
concrete when one can say exactly what subtraction
will be done. The
camera’s orthonormal basis is a natural to be the
canonical transformed
sensitivity. Orthogonality means “no redundancy”
and normalization
standardizes the amplitude. There’s a numerical
noise example worked
out in the CIC 14 article. For now, the point is
that expressing camera
sensitivities as an orthonormal basis is a giant
step towards dealing
with noise.
|
|
| Camera
Example, Nikon D1 |
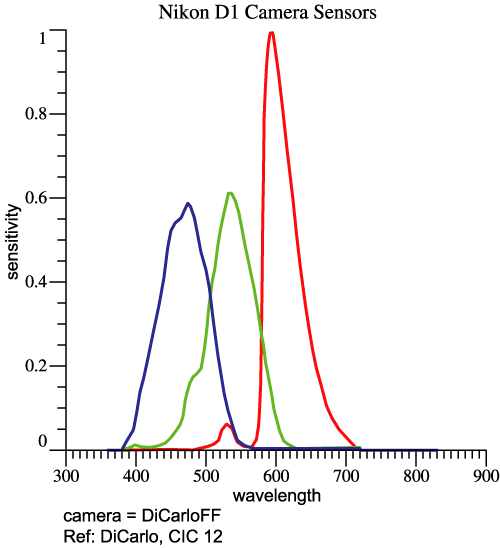
| The last 4 graphs above
pertained
to the Nikon D1, based on data from CIC 12. At right
are the camera’s
red,
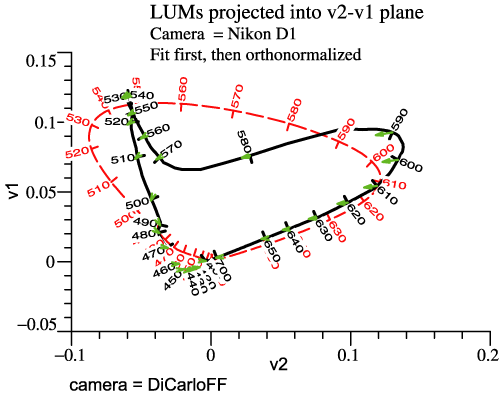
green, and blue sensitivities. The camera’s LUM can be compared to the eye’s. Rather than another perspective picture, we now view the LUMs in orthographic projection (2 graphs below). The dashed curves are the human locus. The solid curves are the camera’s locus, while the tips of the small green arrows are points on the best-fit sensitivity function. |
 |
 |
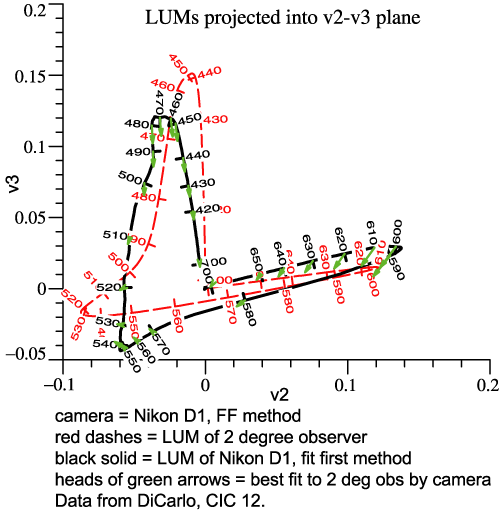 |
| Now
you may say “These curves mean nothing to me!” That
may be at
first, but the graphs contain a complete description
of the camera
sensor, with no hidden assumptions, and no
information discarded. Finding
Some Meaning in the Camera's LUM
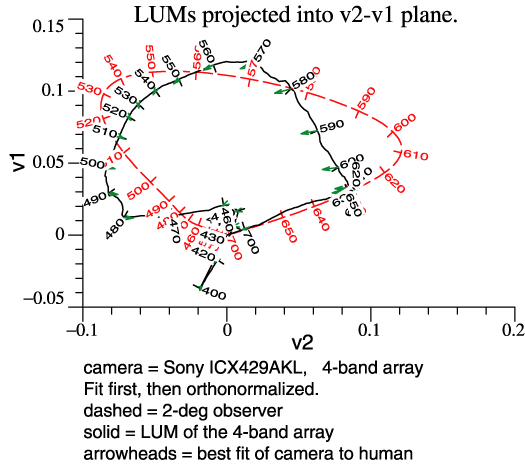
Consider the left-hand graph, “LUMs projected
into
v2-v1 plane.” Only the red and green receptors
contribute to the human
LUM in this view, and v1 is the achromatic dimension
for human, based
on good old y-bar. In this plane at least, the
particular camera tends
to confuse wavelengths in the interval 510 to 560
nm, which are nicely
spread out as stimuli for human. Yellows, say 560 to
580 nm, have lower
whiteness than they would for human. The camera has
other differences
from human that may be harder to verbalize. To the
extent that finished
photos look wrong, one could revisit these graphs
for insight.More
Examples
Five detailed examples were prepared in 2006,
and they
are linked from the further
examples page. For
instance, Quan’s optimal sensor set indeed looks
good in any of
the graphical comparisons to 2°
observer. (See http://www.cis.rit.edu/mcsl/research/PDFs/Quan.pdf
.) |
|
| Something
Completely
Different: a 4-band Array Nominal
time: 3:08 pm
|
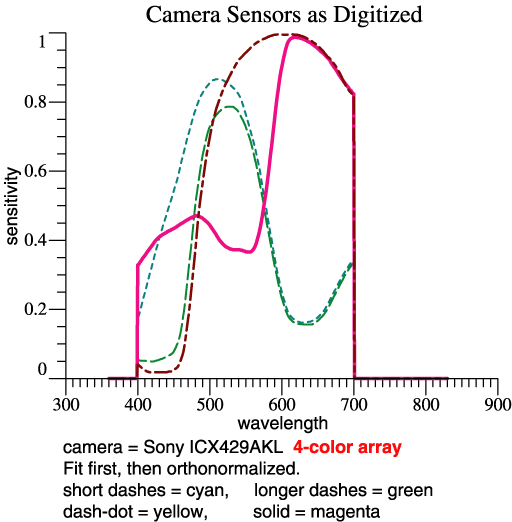
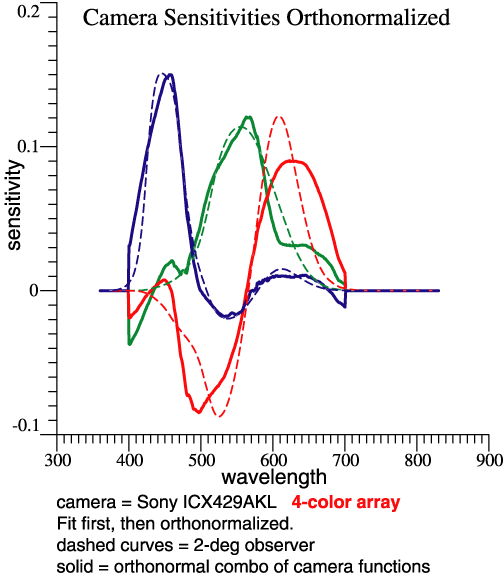
| Sony publishes a
specification for
a 4-band sensor array, the ICX429AKL. I’m not sure
of the intended
application, but it could potentially be applied in
a normal
trichromatic camera. The Fit First Method readily
fits the 4 sensors to
the 3-function orthonormal basis. |
|
| The four sensitivities are seen
at right. The key steps look the same: Rcam
=
RCohen(rgbSens)
. Recall that
the
projection matrix Rcam is a
big square matrix of dimension NxN, where N is the
number of
wavelengths, which might be 471. The 4th sensor adds
a column to the
array rgbSens,
but does not change the dimensions of the result Rcam. After
the key "fit first" steps, I did have to re-think
some auxiliary
calculations because of the 4-column sensor matrix.CamTemp = Rcam*OrthoBasis GramSchmidt(CamTemp, CamOmega) |
 |
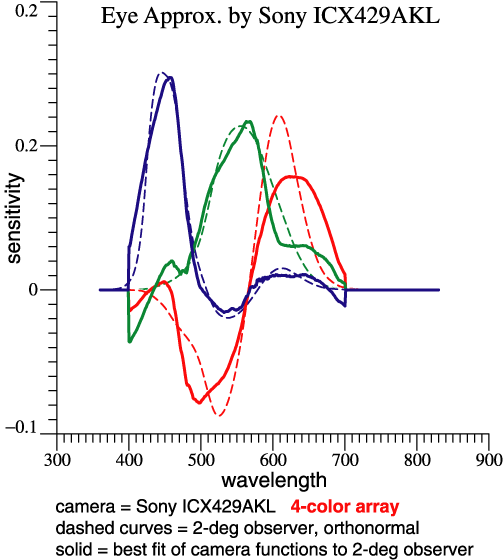
| The camera's
orthonormal basis
Rcam comprises 3 vectors that are linear
combinations of the 4 vectors
in rgbSens. I wanted to find the 4x3
transformation matrix relating the
one to the other, in order to stimulate thinking
about noise. The
program output itself explains the method as
follows: Similar
to Eqs. 15-18
in CIC 14 paper,
Transform from sensors to CamOmega: We want to solve CamOmega = rgbSens * Y , where Y is coeffs for 3 lin. combs. MPP = inv(rgbSens'*rgbSens) * rgbSens' Y = MPP*CamOmega = 0.24845 0.13737 0.35971 -0.34663 -0.43708 -0.45585 -0.22433 -0.088434 -0.033503 0.26839 0.22522 0.055984 Column amplitudes = vector lgth of each column = 0.55158 0.51812 0.58433 The columns of rgbSens actually contain the 4 sensitivities, cyan, green, yellow, magenta. MPP is the Moore-Penrose Pseudoinverse. (See Wikipedia and pp. 9-10 in "notes.") Keeping in mind that the sensitivities are all >= 0, matrix Y gives some idea how much subtraction is done to produce the sensor chip’s orthonormal basis. That’s a step toward thinking about noise. Below are the 3 orthonormal functions, and also the 3 best-fit functions made from the 4 camera sensitivities. The only source of “noise” is the errors that I introduced while converting graphs to numbers. It becomes more visible here, after subtractions. |
|
 |
 |
|
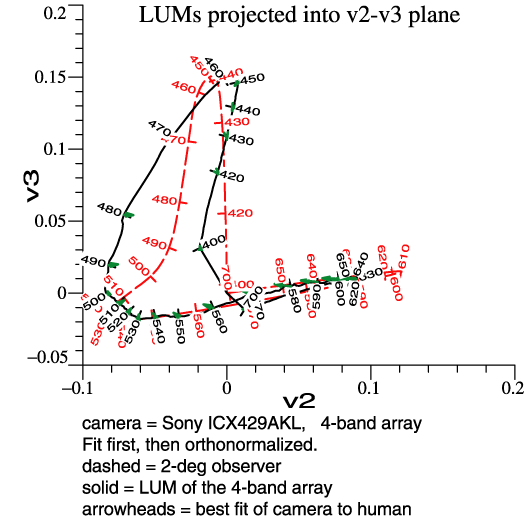
Some noise also shows up in the projections of the LUM, below. It would appear that color fidelity is not good; reds and oranges may lose some redness. |
|
 |
 |
| Combining
LEDs to Make a White Light? |
| In
the
1970s, William A. Thornton asked an interesting
question: If you
would make a white light from 3 narrow bands, how
would the choice of
wavelengths affect vision of object colors under the
light? His
research led to the Prime Colors, a set of
wavelengths that reveal
colors well. From that start, he invented 3-band
lamps and was named
Inventor of the Year in 1979. He continued his
research and made the
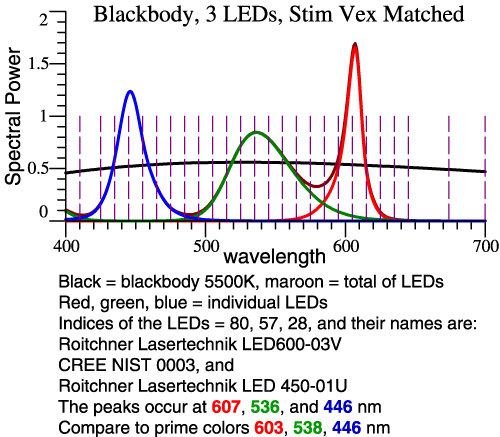
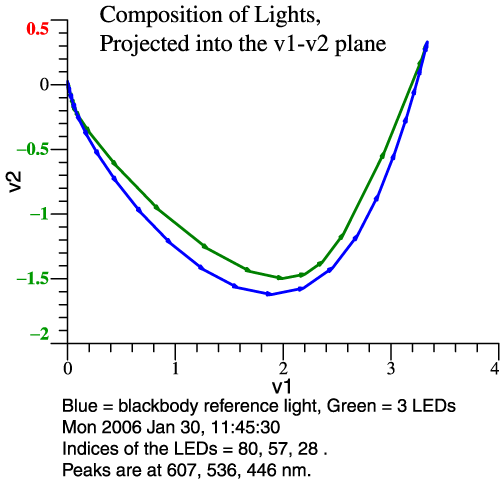
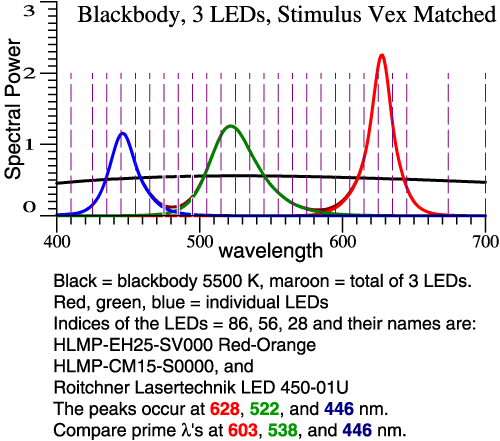
definition of prime colors more precise. Problem Statement: For the 2° Observer, Thornton’s Prime Colors are 603, 538, 446 nm. [See CIC 6, and Michael H. Brill and James A. Worthey, "Color Matching Functions When One Primary Wavelength is Changed," Color Research and Application, 32(1):22-24 (2007). Also see Wavelengths of Strong Action, above.] If you would make a light with 3 narrow bands at those wavelengths, the light would tend to enhance red-green contrasts, making some colors more vivid, though it would do a bad job with saturated red objects. You might think then that a white light could be made from 3 LEDs whose SPDs peak at those wavelengths. This idea falls short because LEDs are not narrow-band lights. Our task then is to see what happens when real LEDs are combined, and design a good combination by speedy trial-and-error. We'll see two graphs per example: the LED spectra and their sum, and then the vectorial composition of the LED light in comparison to 5500 K blackbody. Clicking either image gives more detailed information. Example 1: Let LED
Peaks ≈ Prime Colors
The reference white is 5500 Kelvin blackbody.
From 119
types measured by Irena Fryc, 3 LEDs are chosen by
their peak
wavelengths, as shown at left. Then we see at right
that the blackbody
(blue line) makes a bigger swing to green and back.
This LED combo will
dull most reds and greens. |
|
 |
 |
|
Example
2: Greener
Green and Redder Red
To increase the swing towards green and back,
we let
the green be greener (shorter λ)
and the red be
redder (longer λ).
In all
cases, the LED amplitudes are adjusted so the total
tristimulus vector
matches the blackbody. |
|
 |
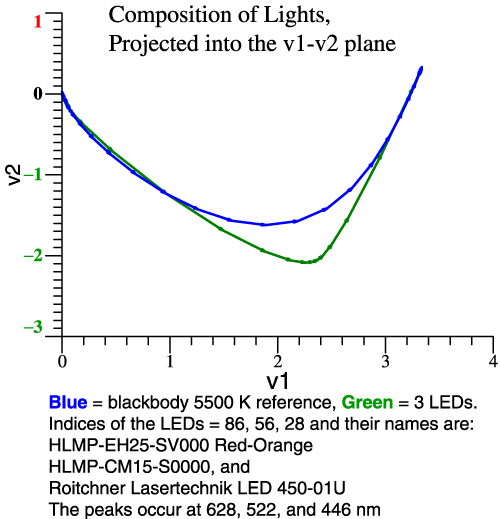 |
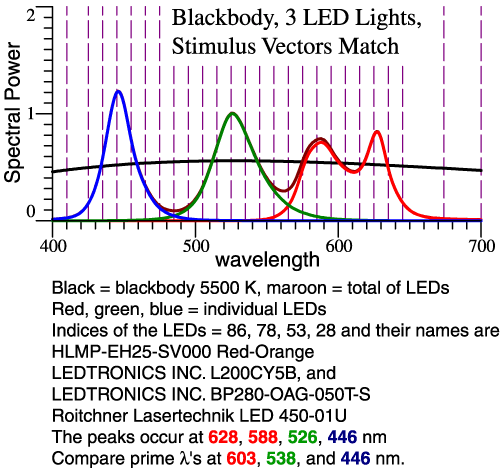
| Still
on example 2, we can see
from the vector composition (right-hand graph) that
red-green contrast
will be good, but some colors may be particularly
distorted. Clicking the
left-hand graph confirms that idea in the
color shifts of the 64
Munsell papers. Example 3: Broaden
the Red Peak
The problem in example 2 is known to some
lighting
experts.
The light needs to have a broader range of reds. The
remedy is to use 2
red LEDs. For simplicity, the proportion of the 2
reds is fixed, not
adjustable. |
|
 |
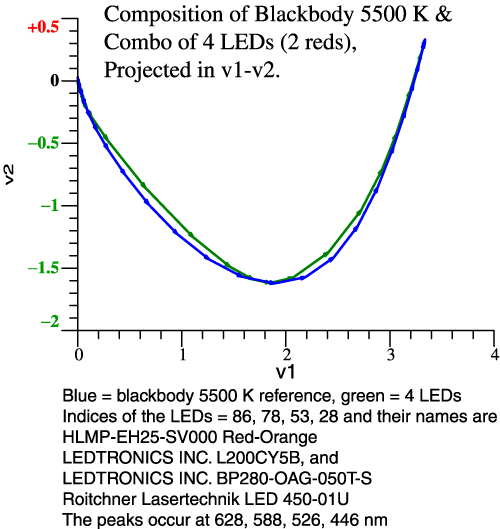 |
| Think
of those green and red limit colors. Some of those
colors will still be
dulled, but
we are tracking the blackbody pretty close. Further
tweaking is
possible. |
|
| Vectorial
Color |
| Invariants |
| Food for Thought ... |
| The
End |
|
Thank you very much for signing up and for your attention.
Please feel free to contact me at any time. I am always eager to discuss lighting, color, cameras etc.
Jim Worthey
|
| Special
Credit |
|
William
A. Thornton Michael H.
Brill (But
MacAdam gets a demerit for disparaging
Cohen's work.) Calculations
were
done with O-matrix software. |
William
A. Thornton
1923-2006 |
Jozef B. Cohen
1921-1995 |
Bonus
Picture: Jim Worthey, Jozef
Cohen, Nick Worthey, circa 1993 |
||
| Lighting
for a Copy Machine?? |
| So,
We
Know How to Design a Light. Now Let the Camera Also be a Variable. |
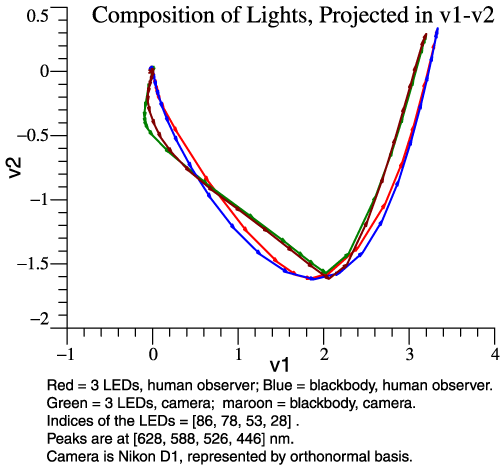
| Let the lights be the last pair demonstrated above. The reference white is 5500 K blackbody. The 2 red LEDs are in fixed proportion, but the R, G, and B LEDs are adjusted to match the blackbody. The adjustment of R, G, B is done for human, and then separately for the camera. Using the Fit First method, it is possible to graph the human and camera sensitivities together, and then the compositions of the lights as seen by human and by camera. |
|
Analysis of a
(Very Hypothetical) Color Copier
|
|
| The same
LEDs are
used as in the final light design above, p. 62. The
camera is the Nikon
D1, whose sensitivities are given on page 52. The
data were borrowed
from
DiCarlo’s paper at CIC 12. (Page numbers refer to the tutorial handout.) |
 |
| A
Different Hypothetical Copier |
|
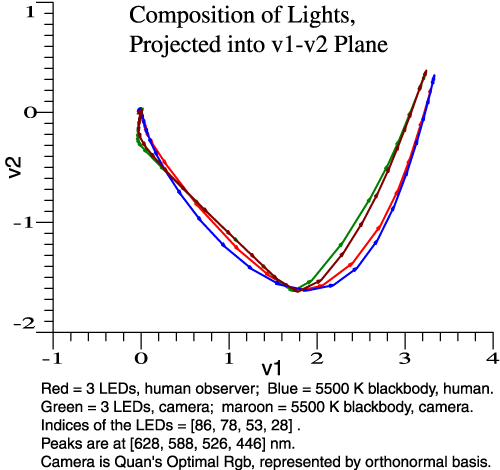
| Now the
light is
the same, but the camera is the “optimal” sensor,
taken from Quan’s
dissertation. The camera’s total “reach” into the green and back towards red is like the eye’s. But, many reds and greens will be dulled. You can see it by thinking of them as pass-band colors. The camera falls short because parts of the chain of vectors are too straight. To this camera, successive bands point in the same direction in color space, at least in this projection. We can see the same thing by looking at the Quan sensor’s Locus of Unit Monochromats, next graph. To the extent that a camera fails to discriminate certain wavelengths, the light can't fix the problem. |
 |
|
At right, the LUM of the Quan Sensor is compared to that of human. This sensor is better than many; It tracks the human LUM in a general way. We can see shortcomings in two areas. Picture the “unit monochromats,” the vectors that define the curves. The human vectors have steadily changing direction but long amplitude, from about 540 nm to 605 nm. Then the human LUM goes smoothly round the bend, but there is still some change of direction at 610, 620, 630 nm.
|
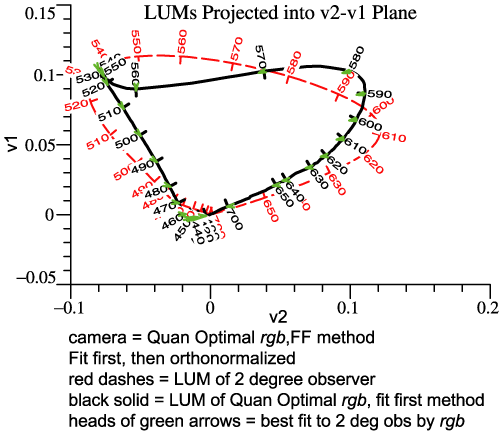 |
| By
contrast, the Quan sensor goes round the bend too
soon, at 585. In a
second quirk, the Quan sensor tends to lump together
520, 530, 540,
550, wavelengths that would be well discriminated by
human. These
features of the Quan LUM translate into the
too-straight regions when
lights are composed on p. 56. The lumping-together of wavelengths around 540 is something that many cameras do, and it happens because the red sensitivity is negligible there. The Quan sensor does discriminate those wavelengths along the v3 or blue-yellow dimension. There is no way to fix the lumping-together by changing the light. At the long-wavelength end, it might be possible to get some marginal improvement by boosting the light at long wavelengths, since the issue is a kind of absolute sensitivity dropoff. |
|
| Bonus
Example: Multi-primary System (N > 3) |
| This example
is
based on real hardware. A laser radiates in 8 narrow
bands at once, 647, 568, 530,
520, 514, 488, 476, and
457 nm.
Using an acousto-optic modulator, it is possible to
modulate the 8
bands separately. I was asked a question about how to
program the
gadget, but a more basic question is, "What do you
really have
colorimetrically?" A red, a green, and a blue would
give a good range
of video colors and then what can the other laser
lines contribute? Each of the lines has an intrinsic power limit, and then according to the wavelength and the eye's LUM, a color vector results. For instance, we know that long-wavelength red makes a nice ruby color, but the eye's sensitivity is declining at the longest wavelengths. Those facts are expressed in the vector diagram, not lost. |
 |
| In
the
diagram above, the wavelengths with their power
limitations give
vectors from the origin. Then those vectors are scaled
down by a
convenient ratio and added to give the total vector of
the unmodulated
laser. The
647 nm is a nice ruby red. The 514 nm line can be a
good saturated
green primary, then there is a question whether the
530 nm line adds
much. A final design would depend on goals, including
needed power
level. The
point for now is that the vector diagram combines
colorimetry with the
physical data in a logical way. |
|
| Stop |
| Scroll
No Farther |
 |
Material Below Addresses Obscure Questions |
|
||||||
|
|
|
|
|