 |
 |
|
| Jim Worthey • Lighting & Color Research • jim@jimworthey.com • 301-977-3551 • 11 Rye Court, Gaithersburg, MD 20878-1901, USA |
|
|||||||
|
| Five Examples for Comparison |
| An Exception that Proves the
Rule: Foveon X3 and Optional Prefilter |
Rcam = RCohen(rgbSens)
CamTemp = Rcam*OrthoBasis
GramSchmidt(CamTemp, CamOmega)rgbSens is a matrix whose
columns are the 3 camera sensor functions (in this case the Foveon
functions) . Rcam is the projection
matrix based on the camera functions. OrthoBasis is the 3
orthonormal
vectors for human, often called Ω . CamTemp
is then the best fit to OrthoBasis
using a linear combination of the camera sensitivities. In general, the
columns of CamTemp
will not be an orthonormal set, so the Gram-Schmidt procedure is used
to orthonormalize them. The orthonormal basis for the camera sensors is
then CamOmega.
That's the main result, and the camera's locus of unit monochromats is
a parametric plot of the 3 columns of CamOmega.| Foveon X3 Sensor without Prefilter |
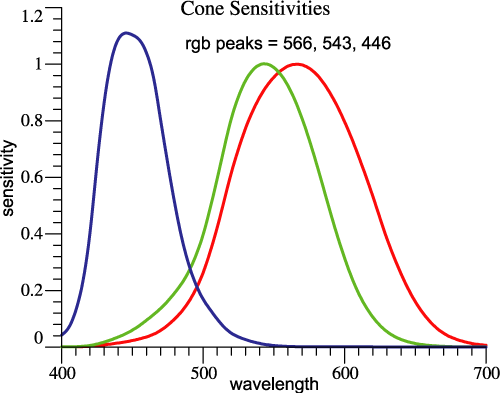
| Human Eye |
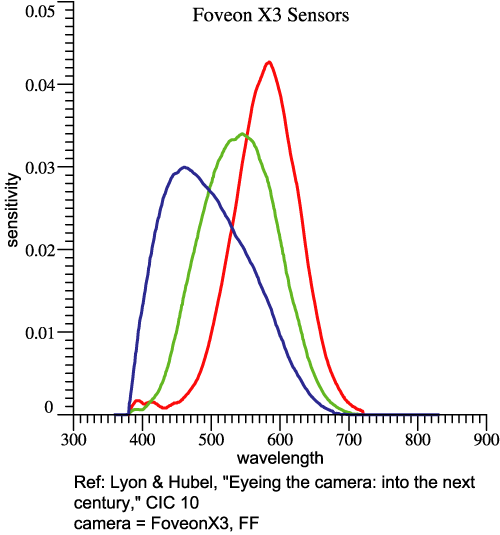
Foveon
3-Color Camera Sensor |
 |
 |
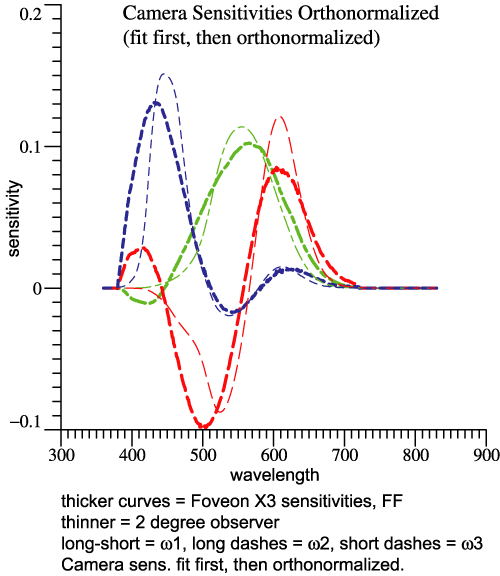
| Native
Orthonormal Basis of Foveon X3 |
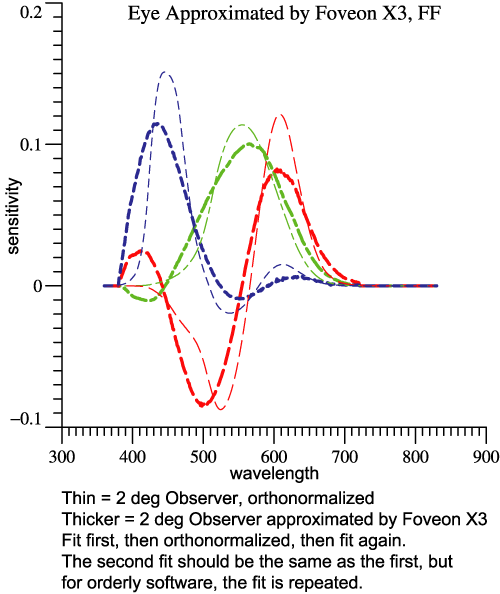
Fit to
Human
Orthonormal Basis by Foveon X3 functions |
 |
 |
| Red dashed =
human LUM projected into v2-v1 Black solid = same projection of Foveon X3's LUM Heads of green arrows = fit to human by Foveon X3 functions, same projection. |
Red dashed = human LUM projected
into v2-v3 Black solid = same projection of Foveon X3's LUM Heads of green arrows = fit to human by Foveon X3 functions, same projection. |
 Click to see the LUM for Foveon X3 (without prefilter) graphed in 3 dimensions! |
 |
| Foveon X3 Sensor with Prefilter |
| Same Foveon
X3 Sensors
as Before |
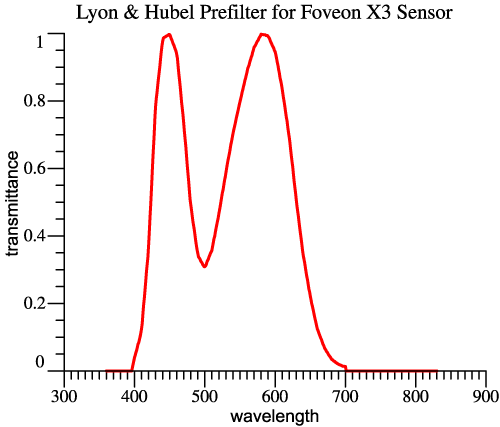
This
Prefilter3 Will Narrow the Functions and Reduce Overall Sensitivity in the Blue-Green Region |
|
 |
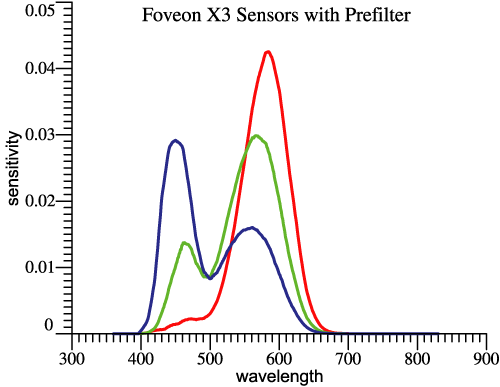
| Foveon X3
Sensors Multiplied by the Prefilter Function3 |
Cone
Sensitivities Consistent with 2º Observer |
 |
|
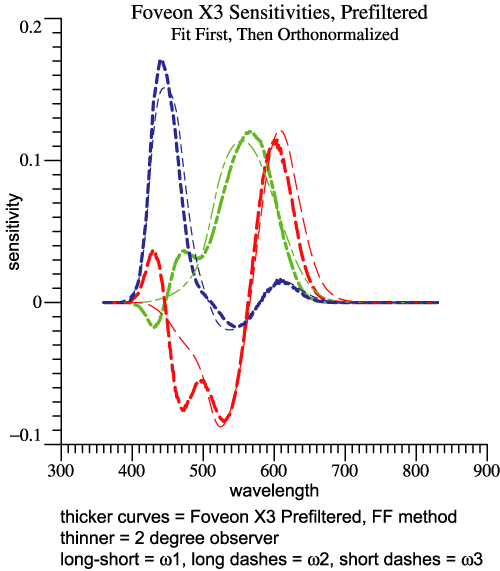
| The thicker curves are the
orthonormal basis for the Foveon X3 sensors with prefilter. The "fit
first" method acts here to give a good alignment of the camera LUM with
human LUM. |
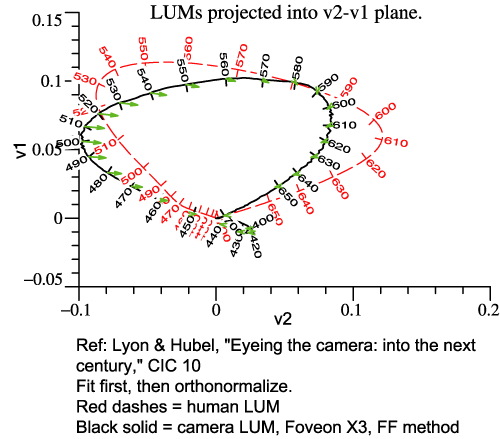
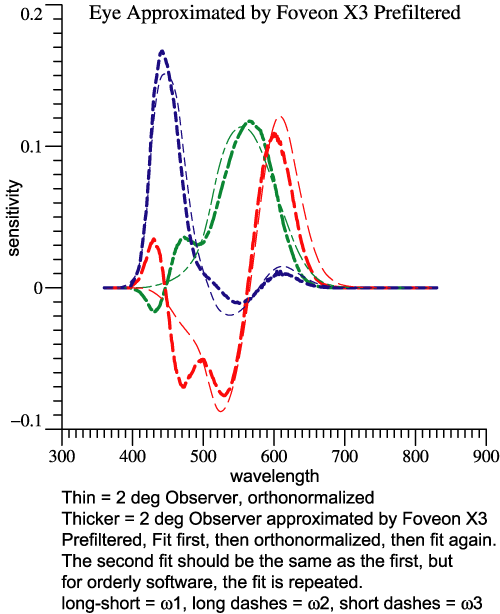
Fit to Human Orthonormal Basis by Pre-filtered Foveon X3 functions. The best fit was found from the orthonormal basis at left. The best fit should come out the same whether the orthonormal basis is derived by the "fit first" method or not. In fact, the fit first orthonormal basis was used. |
 |
 |
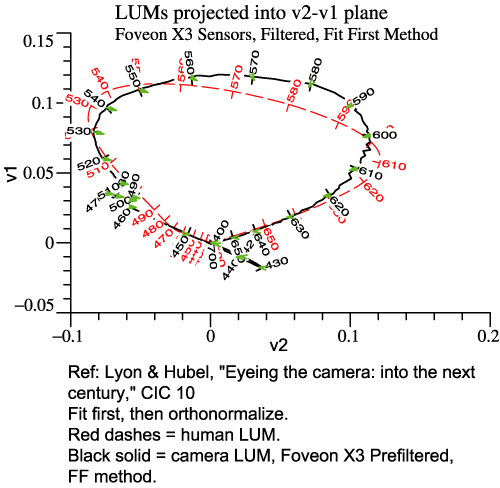
| Red dashed =
human LUM projected into v2-v1 Black solid = same projection of Prefiltered Foveon X3's LUM, found by fit first method. Heads of green arrows = fit to human by Prefiltered Foveon X3 functions, same projection. |
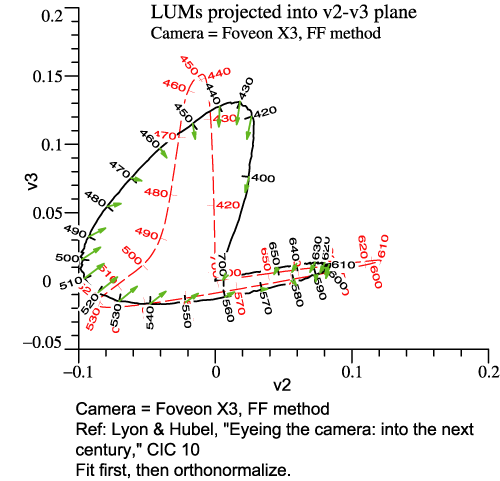
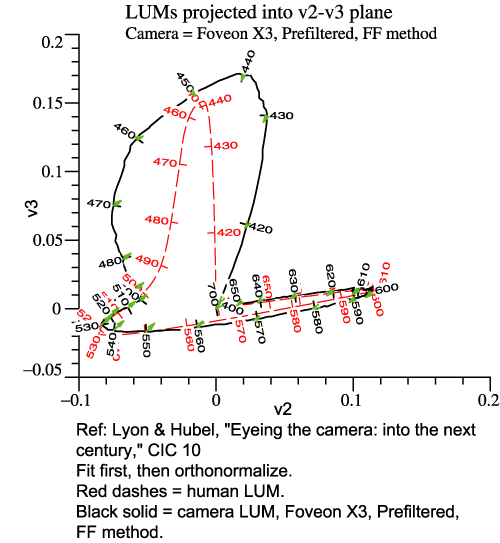
Red dashed =
human LUM projected into v2-v3 Black solid = same projection of Prefiltered Foveon X3's LUM, found by fit first method. Heads of green arrows = fit to human by Prefiltered Foveon X3 functions, same projection. |
 Click to see the LUM for Foveon X3 WITH prefilter, graphed in 3 dimensions! |
 |
| Foveon X3 Sensor with and without Prefilter |
Click to see the LUM for Foveon X3 (without prefilter) graphed in 3 dimensions! |
|
Click to see the LUM for Foveon X3 with prefilter, graphed in 3 dimensions! |
|
| 2°
observer himself |
Foveon X3,
no filter |
Prefiltered
Foveon X3 |
|||||||||||||||||||||||||||
Y = inv(OrthoBasis'*rgbbar) =
|
Y = inv(CamOmega'*rgbSens) =
|
Y = inv(CamOmega'*rgbSens) =
|
|||||||||||||||||||||||||||
| Column amplitudes = 0.0852 0.409 0.153 |
Column amplitudes = 2.71 9.06 8.40 |
Column amplitudes = 5.89 16.5 11.5 |
| Prime
Color λs |
red |
green |
blue |
| 2° observer | 603 |
538 |
446 |
| Foveon X3 |
587 |
510 |
430 |
| Foveon X3, Prefiltered |
591 |
541 |
442 |
| . |
|